Find all CAN communication articles here. The controller area network is a communication protocol defined by ISO 11898 standards. CAN is very popular in automotive industry.
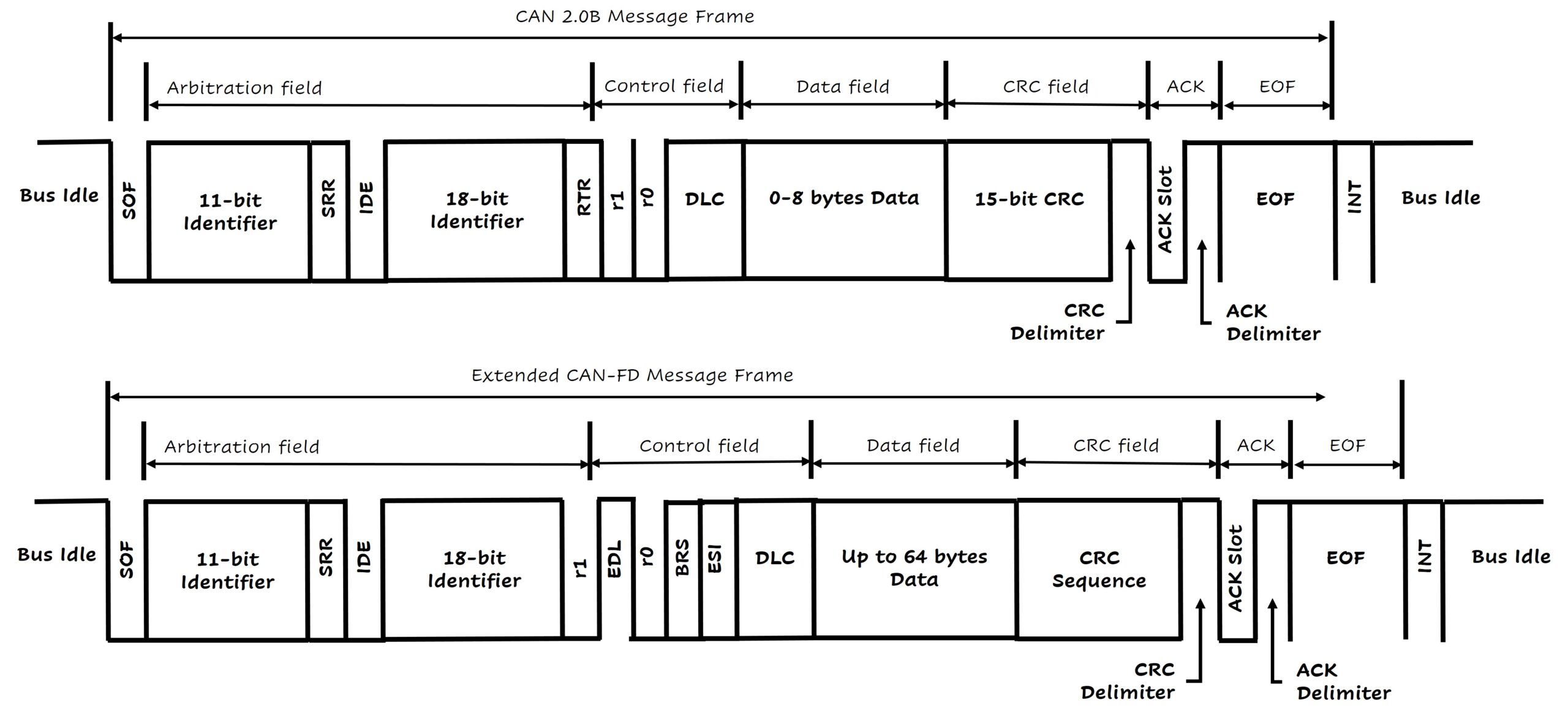
The next big thing in automotive communication is Controller Area Network with Flexible Data-Rate or CANFD. This new standard allows for higher data rates and lower latency than the current…
In J1939 Diagnostics part 1, we have seen diagnostics connector details. We also covered diagnostics trouble code (DTC), failure mode indicator (FMI), DTC Conversion methods, and CAN message defined for…
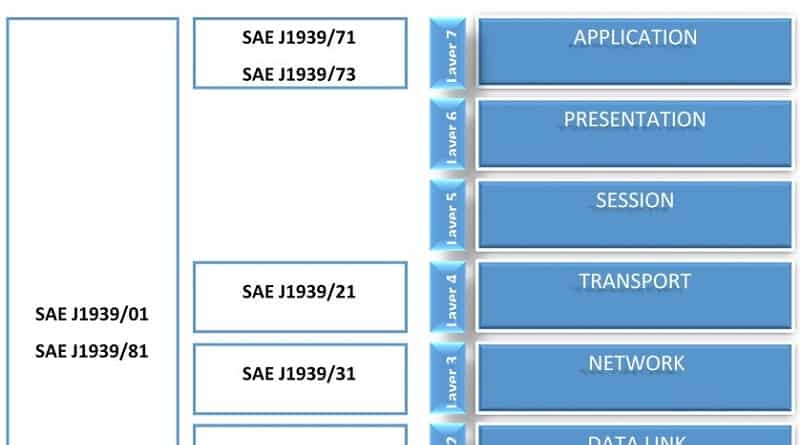
SAE J1939 specifiction defines decentralized network management which means each control unit must implement minimum set of functions. The network management functions are described in the document SAE J1939/81. SAE J1939…
CAN protocol supports transfer of 8 bytes of data in one frame. What if you want to transfer large data? SAE J1939/21 specifications defines fragmented transmission of large data known as transport protocol…
Diagnostics functionality is very crucial for repairing and maintaining any system. The complex system often need to identify and communicate faults to different subsystems, need calibration functionality, need the ability…
Introduction SAE J1939 or often called as CAN J1939 protocol is set of standards defined by Society of Automotive Engineers (SAE). It is recommended practice that defines how the data…